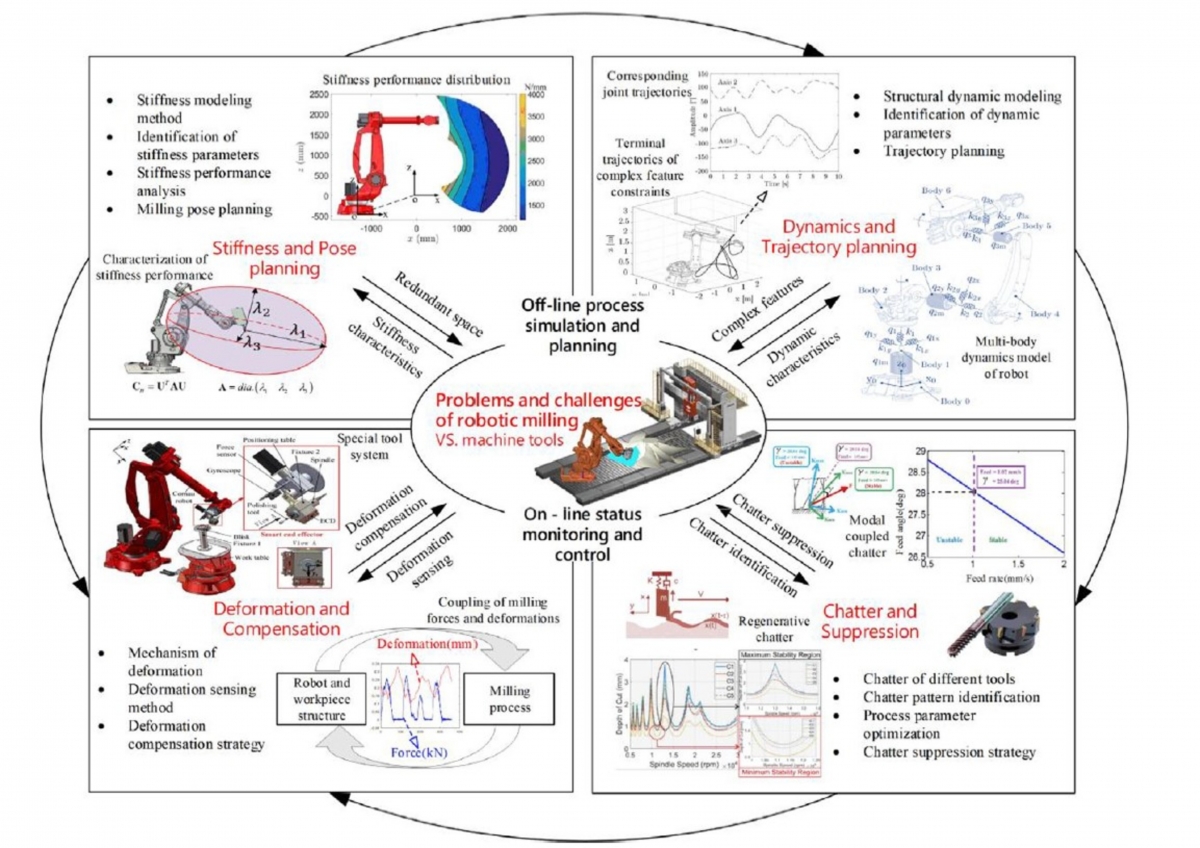
Desde la perspectiva del fresado robótico de piezas complejas, las temáticas que influyen y, sobre las que se están desarrollando diferentes proyectos, se centran en la planificación del proceso de mecanizado y las técnicas de control de mecanizado, incluyendo el análisis del espacio de trabajo del robot, la planificación de su trayectoria, la monitorización y el control de las vibraciones, la monitorización y la compensación de las deformaciones. Además de los principios de estas tecnologías, como las características de rigidez del robot, las características dinámicas, los mecanismos de vibración y mecanismos de deformación, los métodos y características relacionados con la teoría y la tecnología del fresado robótico de piezas complejas se resumen a continuación.
El fresado robotizado es una importante tecnología de la fabricación inteligente. Con el desarrollo de los robots industriales, la visión, la detección de fuerzas y las tecnologías de aprendizaje de máquinas, el fresado robótico ha ocupado gradualmente un determinado campo de la industria y ha mostrado un fuerte impulso de desarrollo. El sistema de mecanizado robótico inteligente, que utiliza el robot industrial como actuador, sensores de múltiples fuentes (como visión, fuerza y vibración) como sistema de percepción, aprendizaje automático y una plataforma inteligente en la nube como sistema de decisión, puede completar tareas de fabricación antropomórfica de acuerdo con información incompleta, información imprecisa sobre condiciones de trabajo sin certeza, conocimiento previo y modelo de predicción. Además, el sistema de mecanizado robótico inteligente puede combinar los datos de monitorización con el modelo teórico para lograr una mayor precisión y eficiencia en las tareas de fabricación.
Varios países y regiones productivas del mundo han presentado planes de apoyo relevantes para la tecnología de mecanizado con robots inteligentes. Por ejemplo, la Unión Europea propuso el enfoque del proyecto COMET para mejorar la precisión del robot de mecanizado; Europa propuso el programa de cooperación ''HEPHESTOS" con el fin de utilizar el robot comercial para completar el mecanizado de materiales de baja maquinabilidad; la Fundación Nacional de Ciencias de EE.UU. propuso la Iniciativa Nacional de Robótica (NRI 2.0), que se centra en los robots colaborativos; la Fundación Nacional de Ciencias de China propuso un importante programa de investigación "Investigación sobre la teoría básica y la tecnología clave del robot en comunión con el humano", que incluye la investigación sobre la colaboración hombre-máquina en la fabricación inteligente. Con el fin de apoyar una mejor aplicación de los robots en el campo de la fabricación inteligente, muchas instituciones de investigación académica han llevado a cabo la investigación de la teoría sobre los problemas científicos específicos de la fabricación con robots, como el Instituto Fraunhofer, la Universidad de Sheffield AMRC, la Universidad de British Columbia (UBC), la Universidad de Tsinghua (THU), la Universidad de Beihang (BUAA), la Universidad Jiao Tong de Shanghai (SJTU), la Universidad de Ciencia y Tecnología (HUST), etc. El procesamiento robótico inteligente se ha aplicado en los dos campos siguientes y se han conseguido notables logros.
Procesamiento colaborativo de piezas grandes y complejas por parte de varios robots
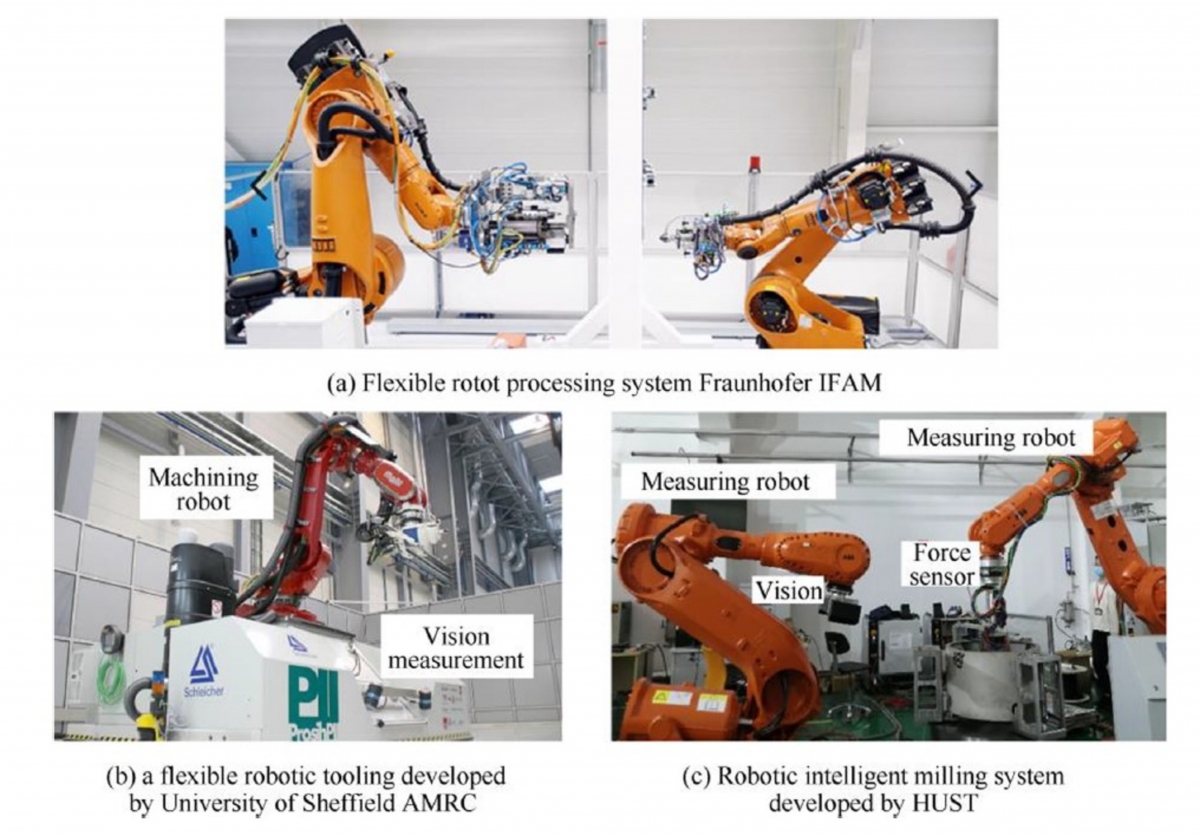
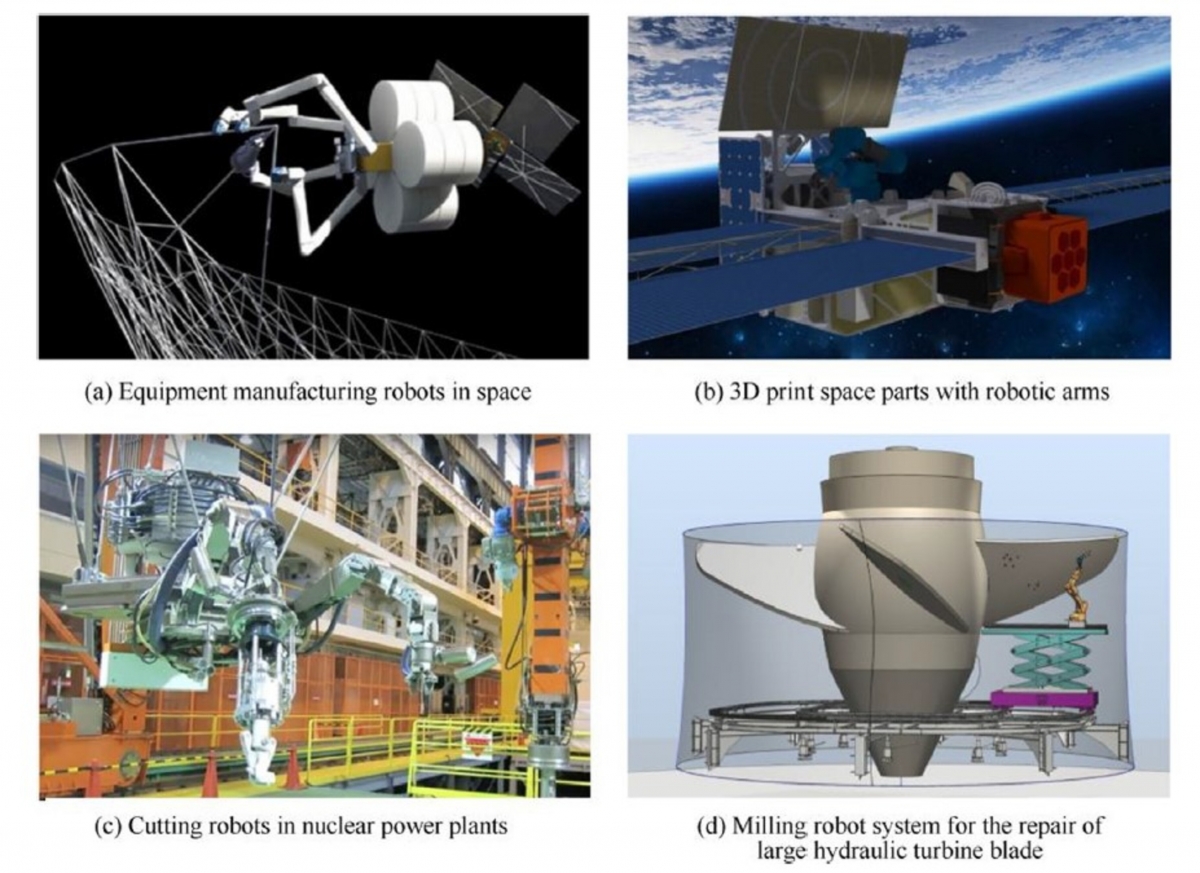
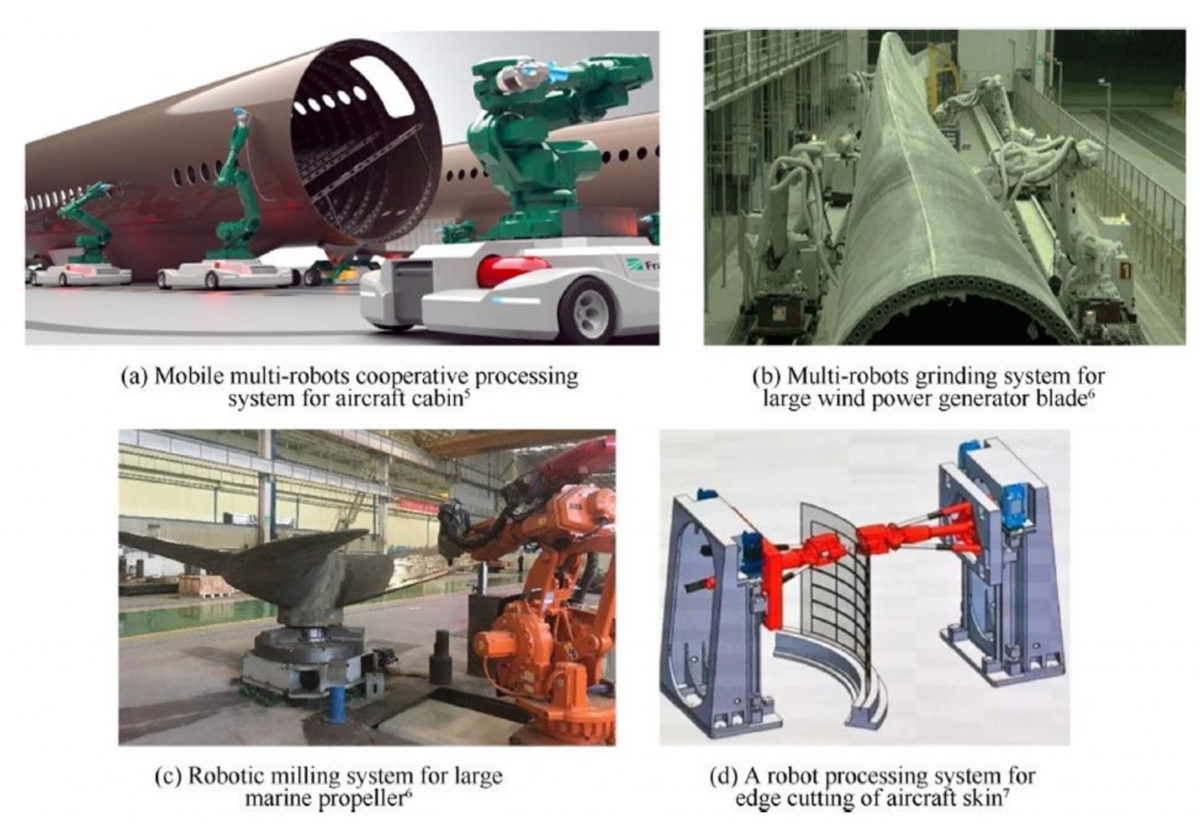
Estas piezas se caracterizan por su gran tamaño y su compleja estructura y, generalmente, se procesan con grandes máquinas-herramienta CNC de 5 ejes CNC, que ocupan gran cantidad de espacio en la fábrica con un alto coste operativo. El fresado robótico es flexible y fácil de ampliar, ya que se puede realizar con múltiples robots y la cooperación de múltiples dispositivos, y facilitar la construcción y formación de un sistema inteligente integrado de medición y supervisión. No sólo cumple con los requisitos de procesamiento de piezas de estructuras complejas superficialmente, sino que también consigue el objetivo de reducir los costes y mejorar el mecanizado. Algunos desarrollos en esta línea son: el Fraunhofer IFAM desarrolló el sistema de mecanizado cooperativo con múltiples robots móviles para el procesamiento de cabinas de aeronaves, el HUST-Wuxi Research Institute desarrolló el sistema de rectificado multirobot para la pala de un gran generador de energía eólica, y construyó el sistema de fresado robotizado para hélices marinas de gran tamaño, el SJTU desarrolló un sistema de fresado robótico para el corte de bordes de pieles de aeronaves.
Mecanizado robótico inteligente de piezas multivariadas y pequeñas
La industria aeroespacial, así como la fabricación a medida, plantea cada vez más demandas de piezas multivariadas y de lotes pequeños. Este tipo de piezas tiene las características de una distribución desigual de la asignación de mecanizado, altos requisitos de calidad superficial de mecanizado, algunas piezas no pueden ser procesadas por las máquinas-herramienta, sino que necesitan la ayuda de las magníficas habilidades de los trabajadores senior. El fresado robótico puede integrar tecnologías avanzadas de visión artificial, percepción de fuerzas y aprendizaje automático para construir un sistema flexible de mecanizado robótico inteligente, realizar la medición autónoma, la toma de decisiones autónoma, la ejecución y supervisión autónomas, aprender y extraer conclusiones de lecciones de la experiencia del procesamiento de las personas y superar las dificultades de fabricación de piezas relevantes. Algunos ejemplos de desarrollos relacionados con esta línea de trabajo es el de Fraunhofer IFAM que desarrolló el sistema de mecanizado flexible con medición de visión y fresado robótico para el procesamiento de las placas de las alas de composites de Airbus, el AMRC de la Universidad de Sheffield que utilizó el robot de brazo en serie para desarrollar un utillaje robótico flexible para las empresas aeroespaciales y de automoción, el HUST que desarrolló el sistema de fresado robótico inteligente con medición de visión binocular, medición de detección de fuerza y fresado robótico para el mecanizado de piezas aeroespaciales complejas.
Perspectiva de la investigación
El desarrollo del fresado robotizado no pretende sustituir a las máquinas-herramienta CNC, sino otro nuevo modo de procesamiento con sus propias condiciones adaptables. Desde la perspectiva de las aplicaciones de mecanizado actuales, el énfasis principal de las aplicaciones de fresado robótico es la tecnología de procesamiento rápido reconfigurable que puede satisfacer rápidamente los requisitos de producción personalizados y hacer frente a tareas de mecanizado inciertas. En este aspecto, el fresado robótico ha logrado ciertos resultados notable y tiene un gran potencial de desarrollo. Al mismo tiempo, en comparación con las máquinas- herramienta CNC, la baja rigidez, las características dinámicas dependientes de la posiciòn y los diversos cambios de configuración de los robots se convertirán en un gran reto en las aplicaciones de mecanizado (especialmente en el fresado). Estas deficiencias traen consigo una baja eficiencia y una precisión deficiente y se traduce en una consistencia de procesamiento insuficiente.
Para mejorar aún más la estabilidad y la precisión del fresado robótico, y mejorar su nivel de inteligencia para adaptarse a más condiciones de aplicación, la investigación de la teoría y la tecnología del fresado robótico se ha convertido en un punto clave, y se han obtenido resultados fructíferos. La investigación actual sobre mecanizado robótico se centra principalmente en: optimización del diseño de los componentes del robot, diseño de la calibración de precisión, la rigidez del robot y sus características dinámicas, la estrategia de control colaborativo multi-robot, planificación y programación de trayectorias y métodos de reducción de la vibración, desviación del mecanizado causada por las fuerzas de fresado, supervisión y control en línea del estado del mecanizado, etc.
Mediante el análisis de las características del fresado robótico de piezas complejas de gran tamaño y pequeños lotes de diversas piezas, los problemas a resolver en diferentes condiciones de trabajo son los siguientes. En el procesamiento cooperativo multi-robot de piezas complejas de gran tamaño, el principal problema que hay que resolver es la respuesta dinámica desigual causada por los robots y las características dinámicas de la dependencia de la posición en un espacio de trabajo grande, por lo que es necesario centrarse en la investigación de la planificación del espacio de trabajo, la planificación de la trayectoria del mecanizado y la tecnología de supresión de vibraciones.
Para poder ver el contenido completo tienes que estar suscrito. El contenido completo para suscriptores incluye informes y artículos en profundidad