
Los fabricantes de CNCs suelen encontrarse a menudo en la difícil situación de proveer un sistema de control para un espectro de máquinas muy amplio, cuya idoneidad debe testearse en máquinas con multitud de tipologías de accionamientos para poder ser validados. La variabilidad es tal que muchas veces no es posible abarcar todo el parque de máquinas al que se orienta el control. Incluso si se consideran únicamente los accionamientos de husillo giratorio (los más utilizados en máquina-herramienta para recorridos inferiores a los 5 m) el rango de casos a considerar es muy amplio. Sea por ejemplo el caso de un algoritmo de compensación de rozamiento. Una validación adecuada exige probar dicho algoritmo como mínimo sobre accionamientos directos e indirectos, con guías de fricción y de rodadura, lo que implica disponer de al menos 4 máquinas con los tipos de accionamiento mencionados.
Con objeto de hacer frente a la necesidad de un número extenso de máquinas diferentes para poder validar algoritmos en CNCs se ha desarrollado un demostrador que permita reproducir el mayor número de configuraciones mecánicas que se encuentran en las máquinas reales con accionamientos de husillo giratorio. Las principales características del demostrador son las siguientes:
- Accionamiento mediante husillo giratorio, con posibilidad de ajuste de la precarga entre tuerca y husillo.
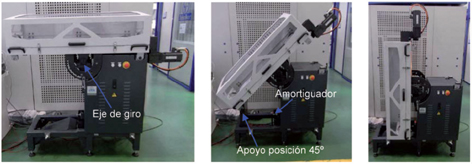
- Movimiento del carro en el plano horizontal, vertical e intermedio a 45º.
- Posibilidad de intercambiar diferentes tipos de motores.
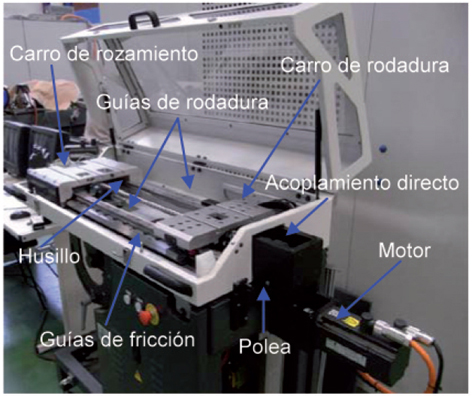
- Posibilidad de seleccionar entre dos tipos de transmisiones: directa mediante acoplamiento flexible e indirecta mediante poleas y correa. Regulación de la tensión de la correa mediante tensor.
- Guiado del carro mediante guías de rodadura o de fricción. En el caso de las guías de fricción, regulación del apriete para variar el valor del rozamiento.
- Diseño de carro para poder fijar sobre él masas adicionales o estructuras flexibles.
Todas estas características hacen que en el demostrador se puedan reproducir los efectos de diferentes rozamientos, de la gravedad, de la flexibilidad de la cadena cinemática del accionamiento en diferentes puntos, de la relación de inercias variable en un amplio rango, etc.
El control del demostrador se realiza mediante un sistema de control de prototipaje rápido que se conecta con el regulador en tiempo real. Este sistema permite desarrollar nuevos algoritmos de control en Matlab/Simulink y ejecutarlos en tiempo real sobre el demostrador.
Para poder ver el contenido completo tienes que estar suscrito. El contenido completo para suscriptores incluye informes y artículos en profundidad