Las técnicas de control activo de vibraciones y de ruido se han aplicado, principalmente, en los sectores aeronáutico y aeroespacial. En el sector de la máquina-herramienta, no existen soluciones adaptrónicas aplicadas en máquinas industriales. A nivel de investigación, la alianza adaptrónica de Fraunhofers (FVA) [1], la Universidad Católica de Lovaina y la Universidad Libre de Lieja son las entidades que mayor experiencia tienen en este campo [2].
Estas entidades están trabajando en la implementación de actuadores piezoeléctricos en fresadoras, tornos y punzonadoras y en el desarrollo de técnicas de control activo de vibraciones en las que los sensores y actuadores actúan en puntos diferentes de la máquina (técnicas de control no-colocado).
El control activo de vibraciones es una de las líneas de investigación en la que se está trabajando en el proyecto ETORTEK - MANUFACTURING 0,0 financiado por el Gobierno Vasco y en el proyecto EUROPEO ADAMOD 'Plug-in adptronic modules for real-time errors (Thermal & Vibration) compensation and superfine positioning in reconfigurable high precision machine tools' [3]. Los desarrollos realizados por Tecnalia es esta línea se explican en el presente artículo. Los proyectos están en curso y la investigación en desarrollo.
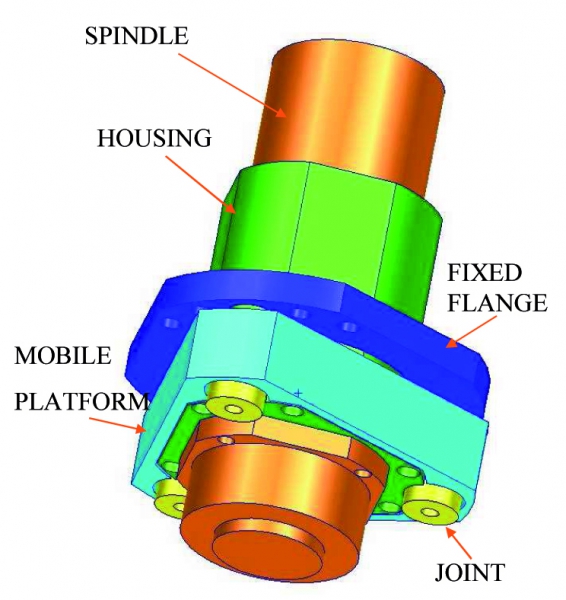
El objeto del presente estudio ha sido diseñar, desarrollar y validar un interfaz adaptrónico, fácilmente integrable en diferentes estructuras de máquina, que incluye actuadores y sensores inteligentes con el objetivo de reducir las vibraciones en la punta de la herramienta. El estudio ha comenzado con la definición de los requerimientos que tiene que cumplir el interfaz adaptrónico para el cual se han realizado ensayos experimentales en la máquina fresadora.
A continuación, se han analizado diferentes actuadores inteligentes y se ha seleccionado el más adecuado para esta aplicación. Seguidamente se ha procedido a diseñar el interfaz adaptrónico. El diseño del interfaz adaptrónico ha consistido, por un lado, en realizar un modelo de elementos finitos para seleccionar y validar el tipo y las características del actuador, definir su posición, comprobar que su efecto cuando está activado es el deseado y diseñar la estructura mecánica que aloja al actuador. Por otro lado, se ha realizado una simulación mecatrónica en la cual se ha definido y validado la posición del sensor y se han desarrollado y ajustado las ganancias de los algoritmos de control.
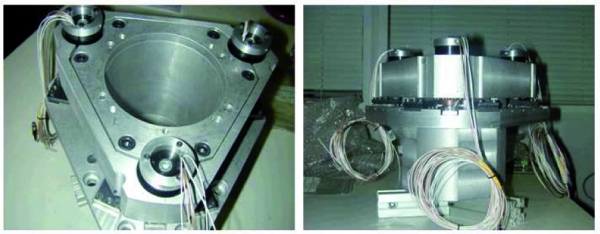
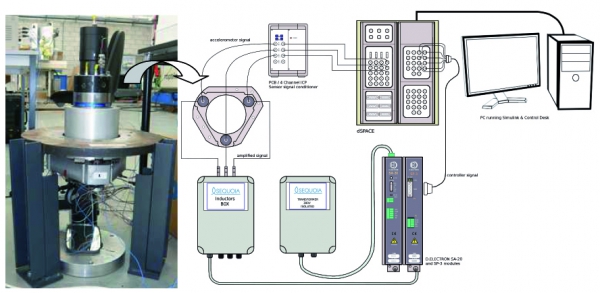
Una vez diseñado el interfaz, se ha procedido a su fabricación y puesta a punto en un banco de ensayos. Para la realización de los ensayos experimentales los algoritmos se han volcado a la plataforma dSpace. La validación experimental de los algoritmos de control está en fase de desarrollo.
Para poder ver el contenido completo tienes que estar suscrito. El contenido completo para suscriptores incluye informes y artículos en profundidad