
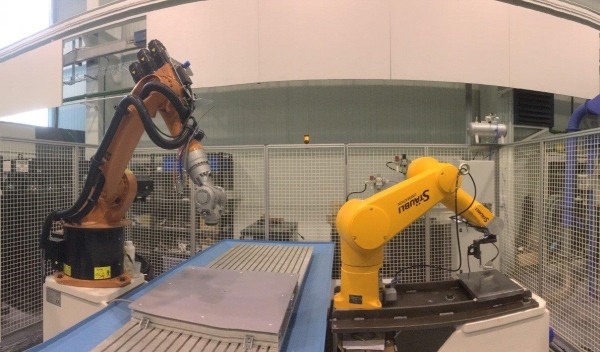
Asegurar la calidad de los componentes es de gran importancia para la mayoría de los sectores industriales. Los estrictos requisitos de seguridad están llevando a aumentar las demandas de inspección y mantenimiento. Hoy en día, el método de inspección por ultrasonidos más común se realiza manualmente con transductores convencionales. Sin embargo, este método de inspección tiene varias desventajas que promueven la investigación de otros sistemas. IK4-IDEKO presenta un caso de inspección automatizada inteligente utilizando robots. El sistema de inspección se ha configurado para inspeccionar y registrar los resultados automáticamente. Una vez registrados los resultados, se emplean algoritmos para optimizar el procedimiento de inspección y controlar los parámetros de fabricación para el aprendizaje continuo.
La integridad estructural de los componentes es de gran importancia para la mayoría de los fabricantes. Esta es la razón por la cual la cantidad de componentes que requieren inspección después de su producción está aumentando.
Entre los métodos no destructivos, la inspección ultrasónica está ganando terreno, porque puede realizarse in situ y no requiere requisitos de seguridad. Esta inspección se realiza la mayoría de las veces de forma manual. Como consecuencia, la inspección claramente depende del operador, en otras palabras, la responsabilidad recae sobre el operador. Las inspecciones manuales se vuelven especialmente costosas en componentes grandes. La inspección de algunos componentes, con altos requisitos de seguridad, puede durar hasta 24 horas, por ejemplo, la inspección de algunos centros del sector eólico. Además, el largo tiempo de inspección puede influir en el rendimiento del inspector.
Los componentes de grandes dimensiones están hechos principalmente de materiales fundidos o compuestos. Este tipo de componentes se fabrica en series pequeñas y con un largo tiempo de entrega. Los grandes fabricantes de componentes están preparados para gestionar muchas referencias diferentes y están buscando un sistema de inspección que pueda abarcar tantas referencias como sea posible.
Teniendo en cuenta estas necesidades específicas, se ha definido una inspección ultrasónica automática e inteligente con robots en el marco del proyecto COROMA. COROMA es un proyecto colaborativo de investigación e innovación financiado por la Comisión Europea en el marco del programa Horizon 2020 con el fin de mejorar las capacidades de cognición del robot para aumentar la competitividad de las empresas europeas de fabricación de piezas metálicas y compuestas.
La inspección automática permite reducir ambos aspectos: el tiempo de inspección y la dependencia del operador. Además, los robots permiten la inspección de diferentes referencias. Por otro lado, se registran los resultados de la inspección, lo que permite la introducción de inteligencia en el sistema.
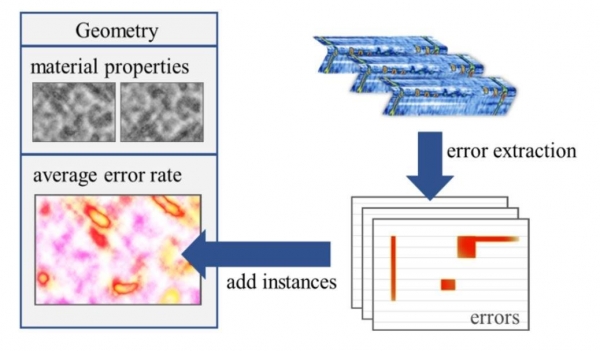
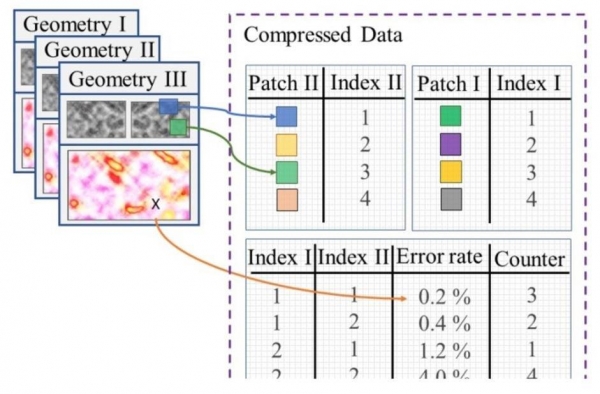
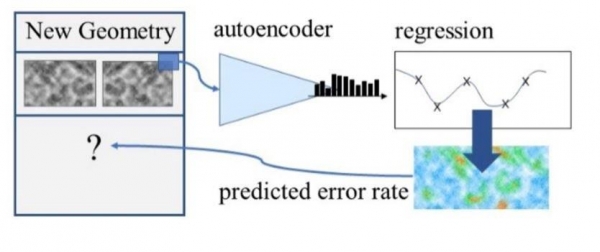
Se ha proporcionado inteligencia al sistema para identificar las áreas más conflictivas en un componente. El análisis de las posiciones de los defectos contribuye a definir los parámetros de fabricación óptimos. Además, la reprogramación de las trayectorias del robot en función de la ubicación de las áreas conflictivas reduce aún más el tiempo de inspección.
Este documento describe el diseño de un sistema de inspección inteligente de un gorro de acero de la industria del sector eólico. La geometría seleccionada tiene 80 metros de largo, 600 mm de ancho y un grosor variable de 5 mm a 70 mm. Aunque se ha seleccionado este caso de estudio, la plataforma inteligente se puede utilizar en componentes con dificultades similares: áreas grandes, archivos de big data, áreas con características similares.
Inspección automática con robots
El sistema de inspección integra los componentes definidos en la tabla 1.
Equipo de inspección
El equipo de inspección estaba compuesto por:
- Hardware ultrasónico (Focus PX, Olympus)
- Adquisición de PC con la aplicación CORO-UT
- Robot (KUKA o Stäubli).
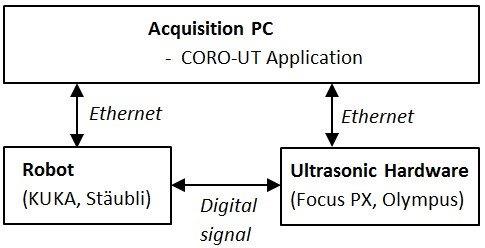
Dentro del marco del proyecto, una aplicación específica, CORO-UT, se ha diseñado para gestionar la información y controlar el procedimiento de inspección. Esta aplicación se instala en una PC de adquisición, que está conectada con el hardware de ultrasonidos y el robot por Ethernet (consulte la Figura 1a).
Por otro lado, el robot ha sido configurado, además de generar movimientos de robot para:
- Enviar al PC de adquisición los comandos para iniciar y detener la inspección.
- Transmitir las posiciones del robot a la PC de adquisición con un período aproximado de 4 kHz.
- Sincronizar la posición del robot y los resultados de inspección. Cada vez que el robot transmite su posición a la PC de adquisición, transmite un impulso eléctrico al hardware ultrasónico (consulte la Figura 1a).
La aplicación desarrollada recibe esta información y ordena la inspección ultrasónica. Una vez que la inspección finaliza, los resultados se guardan automáticamente.
Vale la pena mencionar que la aplicación puede trabajar con robots KUKA y Stäubli. Además, la estructura del software permite una fácil adaptación a otras marcas de robots (ver Figura 1b).
Para poder ver el contenido completo tienes que estar suscrito. El contenido completo para suscriptores incluye informes y artículos en profundidad




